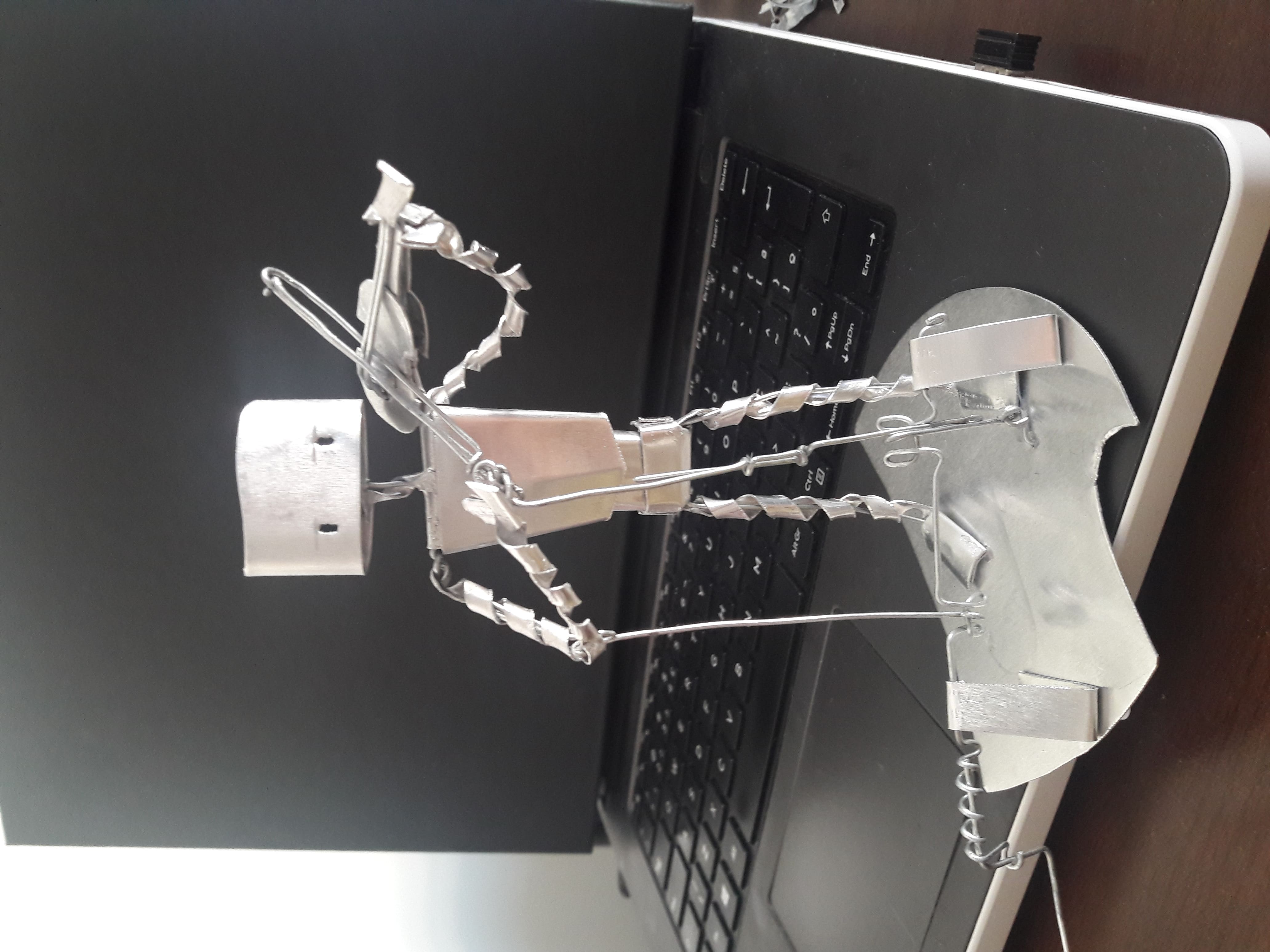
Violinist Bot
His posture could be better.
Concept
This robot seems simple compared to some of the other ones: no props, only one robot and one movement. However it was interesting to try reproducing a movement I didn't really understand. I don't play the violin so I had to look at some videos to plan out the movement. It was a also the first time I made a robot with 3 hinges on one arm, which is much more complicated to control.
Construction
There were mostly no issues while making the robot's body. Only the playing arm took a little more attention: I had to make very small hinges and also make them sturdy so that it wouldn't be too wobbly. The mechanism took a bit more tweaking. I couldn't really plan it completely in advance, but I knew I wanted the elbow and wrist to move up and down successively. Then I mounted the whole thing and just tweaked the timing until it was alright.
New things
- Arm articulated in 3 points: the different sections have to be controlled separately.
- Wires added to make the assembly sturdier: the entire body is linked together with internal wires instead of just glue (I'll make a slightly more detailed page about this part of the process). The feet are also connected to the bottom plate.
- Detachable crank handle: to transport it more easily. It stays in place without any glue.
What needs improvement
- Hinges are too flimsy: it makes the movement a bit random. It kind of works in this context because it makes it look like the bot is playing different notes but it could be a problem for a more precise movement.
- Not enough planning: I feel like things worked out a little by luck. I also had to make the lever for the wrist exensible because the motion was weird when the length was fixed... I still have to figure out how to plan out these more complex movements better.
Videos and more pictures
Yeah, vertical format again, sorry about that.
